Product overview
- Part Number
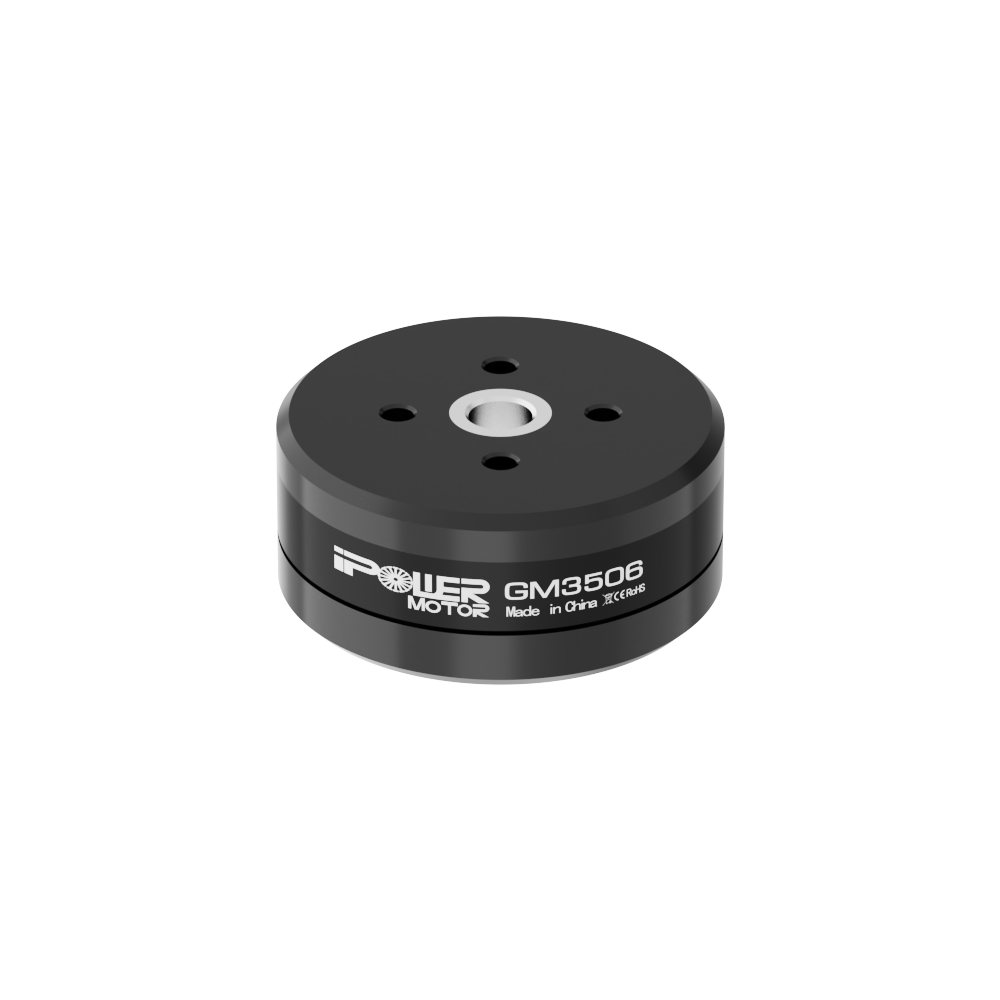
- GM3506 Encoder Combo Set
- Manufacturer
- iFlight
- Product Category
- STACK, CONTROLLER AND ESC
- Update Date
- 2024-05-20
Description
Easy to do gimbal tuning, no need to do much calibration work anymore.
Power saving, 5 times long working time than gimbal without encoder system.
Twin IMUs.
Faster response, motor torque increasing instantly, no bug for difficult rotating angle anymore.
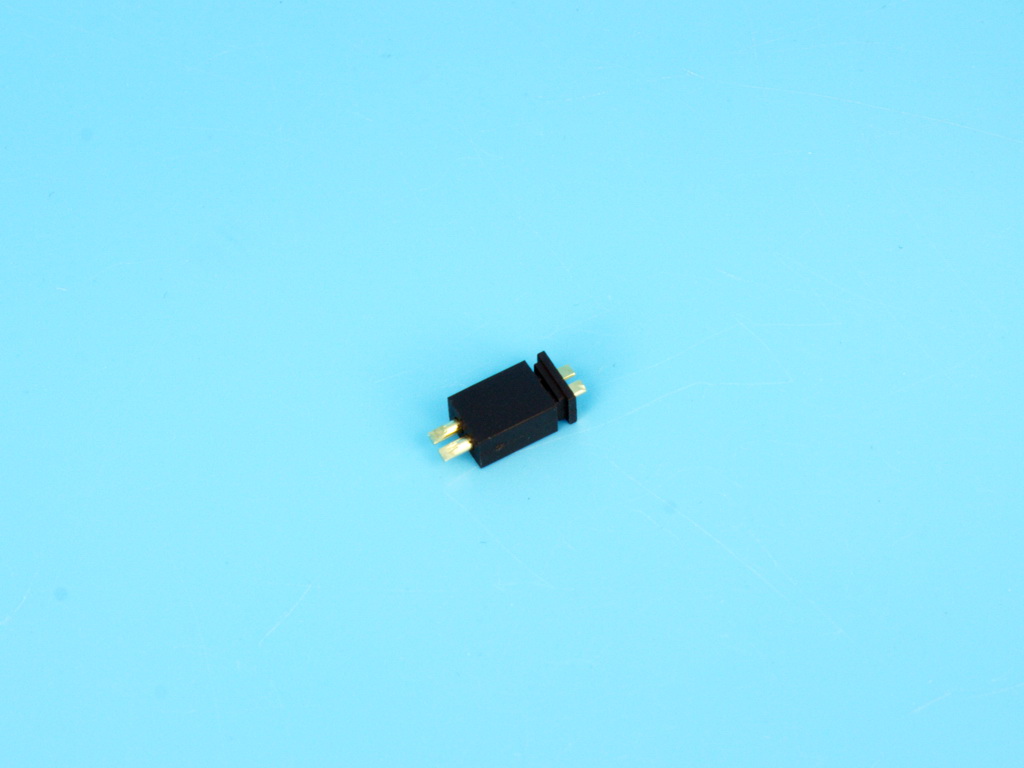
Encoder chip A5048a
Model: GM3506
Motor Out Diameter: Ф40±0.05mm
Configuration: 24N/22P
Motor Height: 25.8±0.2mm (Included with Encoder housing)
Hollow Shaft(OD): Ф12-0.008/-0.012 mm
Hollow Shaft(ID): Ф8.6+0.05/0 mm
Wire Length: 610±3mm
Cable AWG: #24
Motor Weight: 72±0.2g
Wire plug: 2.5mm dupont connector
No-load current: 0.17±0.05 A
No-load volts: 16V
No-load Rpm: 2149~2375 RPM
Load current: 1A
Load volts: 12V
Load torque(g): 600-1000
Motor internal resistance: 5.6Ω±5%(Resistance varies with temperature)
High voltage test: DC500V 1mA @2sec
Rotor housing runout: ≤0.1mm
Steering (axle extension): clockwise
High-low temperature test:
High temperature: Keep at 60℃ for 100 hours, and the motor can work normally after 24 hours at room temperature
Low temperature: Keep at -20℃ for 100 hours, and the motor can work normally after 24 hours at room temperature
Maximum power: ≤25W
Working current: 2-3S
Working temperature: -20~60℃;10~90%RH
Detailed Information
Encoders are special sensors that are added to each brushless motor of a Gimbal Stabilizer allowing the system to more accurately track motor position for increased stability which in turn also increases battery efficiency.
What's encoder technology in brushless gimbal control system?
The 3 axis stabilization gimbal system that relies on both active motor-driven components and passive inertial stabilization. Passive stabilization relies on the principles of inertia (the tendency of an object to resist change in its motion) and requires that the camera is well-balanced in the Pan, Tilt, and Roll Axes. Active stabilization refers to the techniques of using sensors to measure the camera’s Pan, Tilt, and Roll movements and counteract those movements using motors attached to the 3 axes.
Price & Procurement
Associated Product
-
-
-
-
-
-
 Capacity: 300 mAh Nominal voltage: 3.8 V Maximum discharge current: 60C ...
Capacity: 300 mAh Nominal voltage: 3.8 V Maximum discharge current: 60C ... -
 DarkStar20: So light, it makes feathers look overweight. Perfect for sneaking th ...
DarkStar20: So light, it makes feathers look overweight. Perfect for sneaking th ... -
 With 20A Blheli_s ESCs and an integrated ELRS RX, this FC lifts your drone’s per ...
With 20A Blheli_s ESCs and an integrated ELRS RX, this FC lifts your drone’s per ... -